What had to be solved
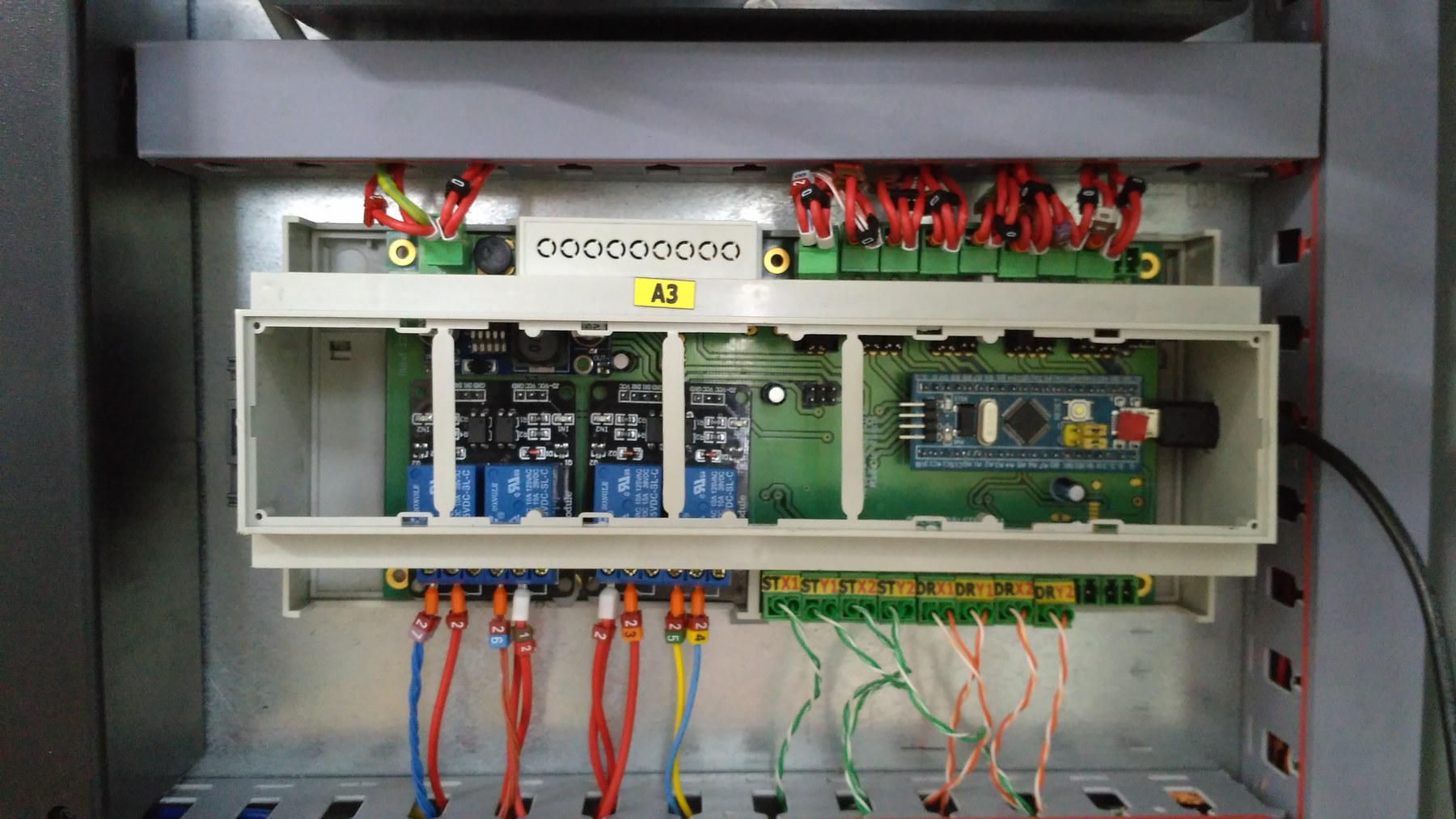
The task was to develop an electronic controller for a machine with four controlled axes, limit sensors, emergency inputs, wheelset-rotation control and additional service functions. Part of the control and G-code preparation logic had to be moved to an external controller.